LStepper Motor Types
There are three basic stepper motor types. They are:
This type of stepper motor has been around for a long time. It is probably the easiest to understand from a structural point of view. This type of motor consists of a soft iron multi-toothed rotor and a wound stator. When the stator windings are energised with DC current, the poles become magnetised, rotation occurs when the rotor teeth are attracted to the energised stator poles.
Permanent magnet (PM) stepper motor
Often referred to as a “tin can” or “can stack” motor, the permanent magnet stepper motor is a low cost and low resolution type motor with typical step angle of 7.5° to 15° (48 – 24 steps/revolution). PM motors as the name implies have permanent magnets added to the motor structure. The rotor no longer has teeth as with the VR motor, instead the rotor is magnetised with alternating north and south poles situated in a straight line parallel to the rotor shaft. These magnetised rotor poles provide an increased magnetic flux intensity and because of this the PM motor exhibits improved torque characteristics when compared with the VR type.
Hybrid (HB) stepper motor
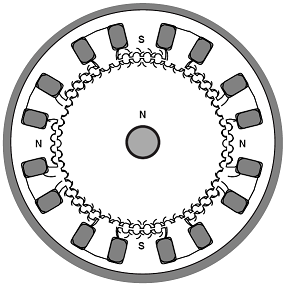
The hybrid stepper motor usually is more expensive than the PM stepper motor, but provides better performance with respect to step resolution, torque and speed. Typical step angle for the HB stepper motor ranges from 3.6° to 0.9° (100 – 400 steps per revolution). The hybrid stepper motor combines the best features of both the PM and VR type stepper motors. The rotor is multi-toothed like the VR motor and contains an axially magnetised concentric magnet around its shaft. The teeth on the rotor provide an even better path which helps guide the magnetic flux to preferred locations in the air gap. This further increases the detent, holding and dynamic torque characteristics of the motor when compared with both the VR and PM types. Figure 1 shows a cross section of a typical HB stepper motor.
- Variable-reluctance stepper motor
- Permanent-magnet stepper motor
- Hybrid stepper motor
This type of stepper motor has been around for a long time. It is probably the easiest to understand from a structural point of view. This type of motor consists of a soft iron multi-toothed rotor and a wound stator. When the stator windings are energised with DC current, the poles become magnetised, rotation occurs when the rotor teeth are attracted to the energised stator poles.
Permanent magnet (PM) stepper motor
Often referred to as a “tin can” or “can stack” motor, the permanent magnet stepper motor is a low cost and low resolution type motor with typical step angle of 7.5° to 15° (48 – 24 steps/revolution). PM motors as the name implies have permanent magnets added to the motor structure. The rotor no longer has teeth as with the VR motor, instead the rotor is magnetised with alternating north and south poles situated in a straight line parallel to the rotor shaft. These magnetised rotor poles provide an increased magnetic flux intensity and because of this the PM motor exhibits improved torque characteristics when compared with the VR type.
Hybrid (HB) stepper motor
The hybrid stepper motor usually is more expensive than the PM stepper motor, but provides better performance with respect to step resolution, torque and speed. Typical step angle for the HB stepper motor ranges from 3.6° to 0.9° (100 – 400 steps per revolution). The hybrid stepper motor combines the best features of both the PM and VR type stepper motors. The rotor is multi-toothed like the VR motor and contains an axially magnetised concentric magnet around its shaft. The teeth on the rotor provide an even better path which helps guide the magnetic flux to preferred locations in the air gap. This further increases the detent, holding and dynamic torque characteristics of the motor when compared with both the VR and PM types. Figure 1 shows a cross section of a typical HB stepper motor.
Stepper Motor Advantages And Disadvantages
Advantages:
1. The rotation angle of the motor is proportional to the input pulses.
2. The motor has full torque at standstill (if the windings are energized).
3. Precise positioning and repeatability of movement since most stepper motors have an accuracy of 3 – 5% of a step and this error is non cumulative from one step to the next.
4. Excellent response to starting, stopping and reversing.
5. Extremely reliable since there are no contact brushes in the motor, therefore the life of the motor is mainly dependant on the life of the bearings.
6. The motors response to digital input pulses provides open-loop control, making the system simpler and therefore more cost efficient.
7. It is possible to achieve very low speed synchronous rotation with a load that is directly coupled to the shaft.
8. A wide range of rotational speeds can be realized as the speed is proportional to the frequency of the input pulses.
Disadvantages
1. Resonances can occur if not properly controlled.
2. The motor is not easy to operate at extremely high speeds, 3000+ rpm.
Stepper Motor Types
There are three basic stepper motor types. They are:
Variable-reluctance stepper motor
Permanent-magnet stepper motor
Hybrid stepper motor
Variable-reluctance (VR) stepper motor
This type of stepper motor has been around for a long time. It is probably the easiest to understand from a structural point of view. This type of motor consists of a soft iron multi-toothed rotor and a wound stator. When the stator windings are energised with DC current, the poles become magnetised, rotation occurs when the rotor teeth are attracted to the energised stator poles.
Stepper Motors: Principles of Operation
Motors convert electrical energy into mechanical energy. A stepper motor converts electrical pulses into specific rotational movements. The movement created by each pulse is precise and repeatable, which is why stepper motors are so effective for positioning applications.
Permanent Magnet stepper motors incorporate a permanent magnet rotor, coil windings and magnetically conductive stators. Energizing a coil winding creates an electromagnetic field with a north and south pole .
The motor can also be "half stepped" by inserting an off state between transitioning phases. This cuts a stepper's full step angle in half. For example, a 90° stepping motor would move 45 on each half step. However, half stepping typically results in a 20%-30% loss of torque depending on step rate when compared to the two-phase on stepping sequence. Since one of the windings is not energized during each alternating half step there is less electromagnetic force exerted on the rotor resulting in a net loss of torque.
See more:
http://blogs.rediff.com/oyostepper/2018/03/21/complete-starter-pack-for-stepper-motor-control-direct-from-your-pc/
https://blog.oyostepper.com/2018/03/21/working-of-a-variable-reluctance-stepper-motor/
OUR GOAL |
